
La mise au point robotisée et automatique quand on fait de l’imagerie stellaire est indispensable, quelques solutions dignes de cette pratique existent et la plus connue est sûrement le Robotfocus© mais son prix n’est pas toujours facilement accessible aux amateurs au budget limité, dont je fait parti.
Depuis quelques années, se développe à l’instar du logiciel Libre, le matériel libre (open hardware) et dans le domaine Arduino fait figure de proue. Arduino est un projet libre de microcontrôleur qui, à la façon d’un mini-ordinateur, peut être programmé pour contrôler des entrées et des sorties analogiques et/ou numériques permettant ainsi de piloter des moteurs, des capteurs, des servo-moteurs et plein d’autres équipements.
L’avantage de ce microcontrôleur, hormis le fait qu’il soit libre et que tout les plans et schémas le concernant sont disponibles et en constante évolution, c’est son prix abordable et sa versatilité qui le rendent très intéressant. Une requête sur un moteur de recherche vous convaincra de toute sa puissance et de ses applications diverses.
Je vous propose ici une solution à base de ce microcontrôleur pour piloter un porte oculaire (de type Crayford) et ainsi réaliser un mise au point précise et efficace.
Commençons par la liste du matériel nécessaire :
– Une carte Arduino Uno (environ 30€) –> le microcontrôleur.
– Un motor shield Adafruit (environ 20€) –> carte additionnelle permettant de piloter le moteur.
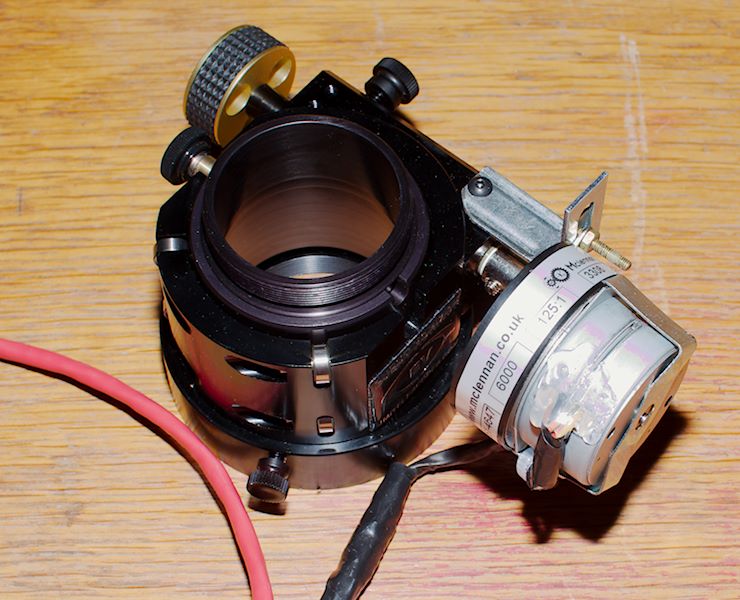
– Un moteur pas à pas : j’ai choisi le même moteur que Robofocus© à savoir un moteur pas à pas de 48 pas/tour avec un motoréducteur intégré de réduction 125:1 ce qui fait 6000 pas/tour ! Soit 0,06° de rotation par pas ! Sa référence est McLennan Servo Supplies P542-M481U-G17L82 (environ 60€).
– Un manchon laiton permettant de coupler le moteur au porte oculaire (environ 3€)
– Une boîte pour l’Arduino et le motor shield (environ 15€)
– Un connecteur femelle (1,90€) (optionnel mais plus pratique pour le rangement car permet de débrancher le moteur du boîtier de contrôle)
– Un connecteur mâle à sertir : (0,60€) (optionnel mais plus pratique pour le rangement car permet de débrancher le moteur du boîtier de contrôle)
– Un câble de type réseau Ethernet pour relier le moteur au boîtier 5 fils nécessaires (longueur en fonction de votre utilisation)
– Un bouton poussoir (environ 1€)
– Une LED (optionnel) (0,25€)
Le tout coûte environ 130€ et est facilement trouvable dans le commerce ou sur Internet, sauf le moteur qui est disponible chez radiospares pour ceux qui y ont un compte.
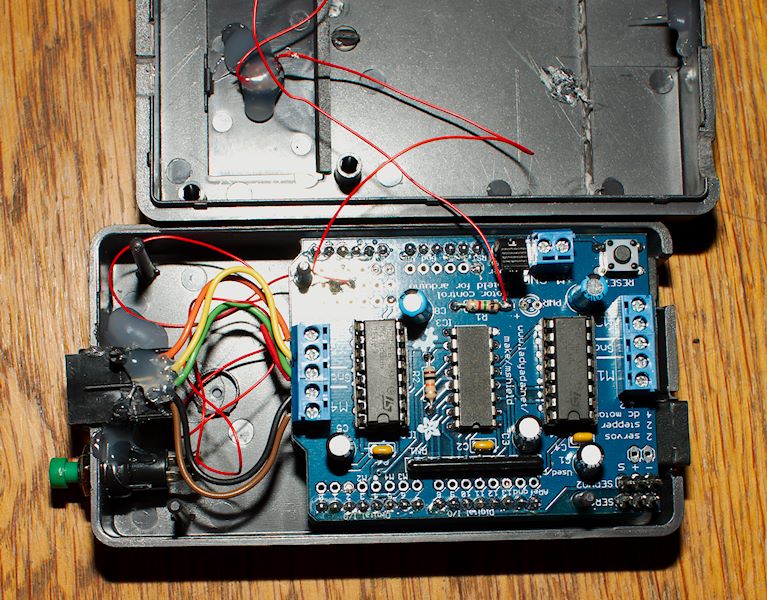
Partie hardware :
Le boîtier avec la LED power :
Face connecteur du moteur avec le bouton poussoir de RAZ :

Face USB pour la connection au PC et avec le connecteur d’alimentation :

La carte Arduino (non visible) est sous la carte Adafruit Motor Shield :
Le moteur pas à pas avec son réducteur :

Le moteur monté sur le Crayford :
Partie logiciel :
N’étant pas un expert en programmation, je me suis tourné vers le driver ASCOM développé par Éric Holmes, son driver se compose de deux parties : le driver en lui même à installer comme une driver ASCOM classique (compatible avec ASCOM V6) et la partie ARDUINO qu’il faut injecter dans le microcontrolleur (il faut y faire quelques modifications afin de l’adapter à son setup : nombre de pas du moteur, vitesse etc.. mais cela reste très simple et basique).
L’avantage d’avoir se système compatible avec ASCOM c’est de pouvoir l’utiliser avec la grande majorité des logiciels astro (Prism, MaximDL, CCDSOFT etc…).
Ayant testé ce système en condition réelle, je trouve la mise au point hyper-précise de l’ordre du micron et tout cela pour un coût très bas ! Il est à noter que le système est reconnu comme de type « Absolu » par les logiciels, ce qui veut dire que la position du Crayford n’est pas connue mais est déduite par rapport à une position initiale (position 0 par défaut) ce qui implique de mettre en butée basse le Crayford en début de session.
Il manque la mesure de la température à ce système, je sais résoudre ce problème coté hardware mais pas au niveau logiciel mais j’y travaille.